ECT机机械系统及床的机械系统设计草案
导言
按8月19日医疗仪器部会议精神对ECT二号机进行改进设计,要求如下:
⑴ 在原有技术参数基础上优化设计,改进缺陷。
⑵ 外观设计美观轻巧,流畅。设备空筒后端做成喇叭口,开阔视野。
⑶ 降低整机高度,减轻重量适合运输。
⑷ 改进配重设计,使之成多块结构可按要求配装。
⑸ 改进悬臂设计,使之轻巧美观。
⑹ 降低ECT机的制造成本。
⑺ 重新计算电机功率,降低设备功耗。
⑻ 改进准直器设计,使换准直器轻松方便。
⑼ 改进床的参数,使之合理适用。
⑽ 改进床的外观,使之美观。
设计思想
本着以改进为原则对ECT主机和床进行改进设计,要求优于原设计并保留优点。
- ECT二号机的机械结构
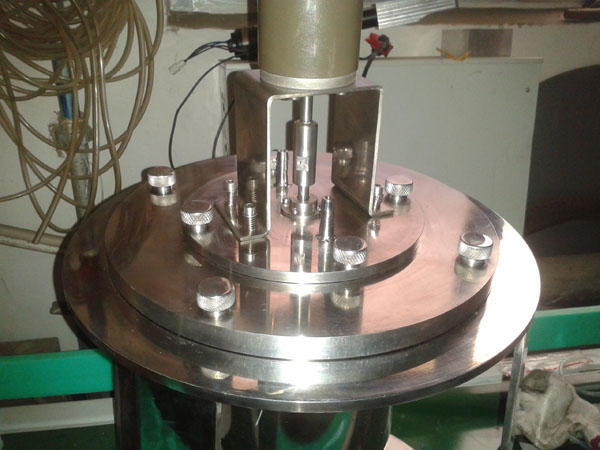
⑴ 基座
基座为箱体结构,体积1458mm×472mm×1460mm。占空间大视觉效果粗重。箱体内存放电器元器件通风不好。钢板厚耗材多(钢板均厚16mm、506kg)焊口长。
⑵ 基座与旋转框架连接
基座与旋转框架装配由大轴承、过渡环一、过渡环二、旋转框架相互连接而成。基座与旋转框架间隔空间大、装配繁琐、过渡零件多。过渡环二没有特殊的作用,而且使基座与旋转框架间隔达200mm,探头重心前移。
⑶ 旋转框架
旋转框架为部分开放的箱体结构,使用钢板均厚14mm箱体厚126mm宽1060mm。考虑不影响安装工艺的条件下,箱体尺寸相应减小钢板减薄。与旋转框架连接的滑动框架体积也较大984mm×172mm×289mm使用钢板均厚16mm考虑不影响安装工艺的条件下,箱体尺寸相应减小钢板减薄。
⑷ 准直器安装
准直器重量重,安装定位不精确。安装准直器时准直器车与探头、准直器与车没有定位装置,安装费力耗时。准直器车移动费力。
⑸ 悬臂结构与安装位置
悬臂安装位置位于基座顶部中间位置,支架高445 mm 使整机高达1976mm。悬臂长1900mm 截面70mm×50mm较粗大,推动费力影响美观。
⑹ 机壳与外观
ECT二号机外观设计视觉感觉粗重,工业设备角色较浓。与床配套的整体感不强。
- 床的机械结构分析
⑴ 床板
- 床板截面结构
床板截面为月牙形厚度65mm。这样的厚度在探头对人背面扫描时会比正面扫描产生误差。此外床板美观设计不够。
- 床板的长度与行程
现床板的长度2620mm,行程1900mm 扫描范围1805mm(从床头至视野区域内有95mm无用区)
- 床的升降位移
床的升降位移为745mm~1120mm 最低位745mm 病员上床有困难。最高位1120mm超出ECT机中心高950mm 170mm之多。实际床板升高至950mm为合适。
④ 手动功能
床板在不受电控时不能手工拉动,在临床操作时需要手动推拉,现用床只有自动功能。
- 械升降机构与外观
现有升降机构比较成熟、稳定。但外形占空间大,改变外形不灵活。床板周边无保护拦板,在床板前伸时容易刮碰病员身体。且使床的整体造型欠美感。
- 对二号机的改进和三号机的设计
- ECT和床的平面布局
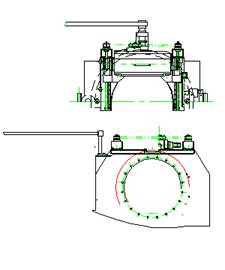
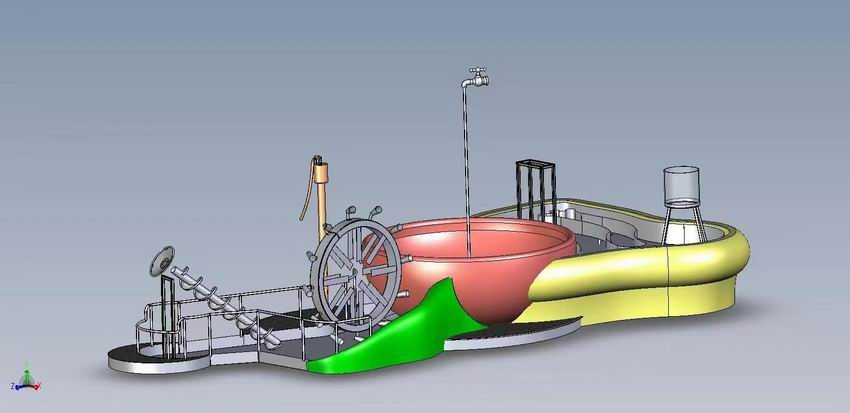
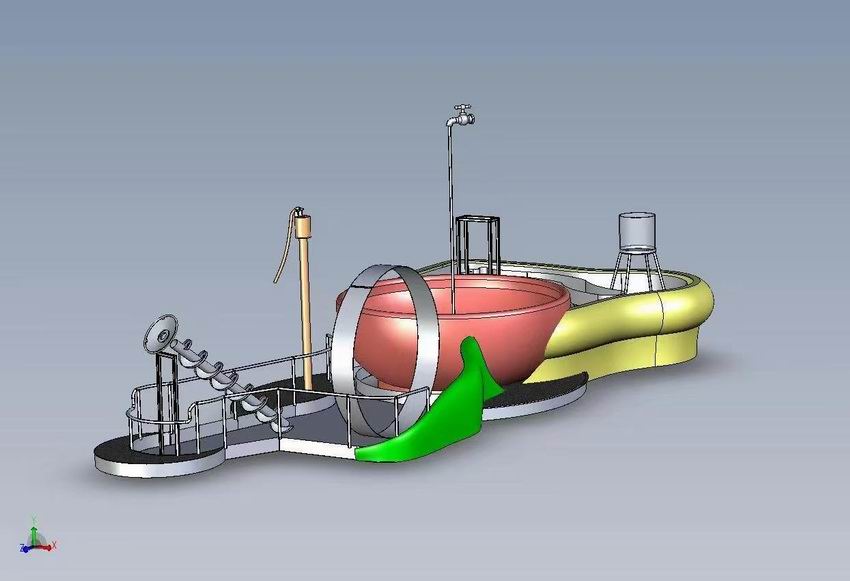
三号机设计为主机、病床、准直器库车、电源箱及控制仪器箱的布局组合。见二号(图a)三号机(图b)
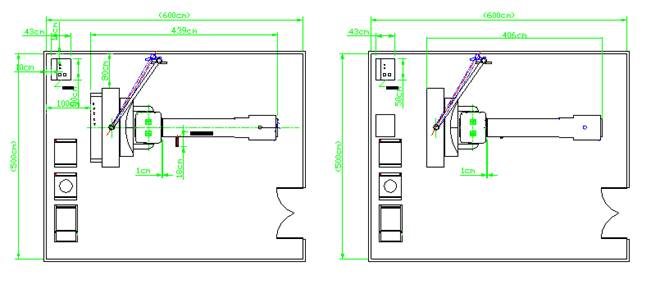
主机占地面积减小0.26m2并分散放置,控制仪器移出主机之外便于维修和通风,运输时可单独装卸避免损坏。安放设备更灵活。
(图a) (图b)
- 三号机的性能参数与技术要求
⑴探头
①探头的摆动
摆动角度:-20°~ +180°
操作方式:手动
自锁:要
停电时可移动:要
摆动限位:有挡块
脉冲编码器表示:1°(单位)
DA/PC控制:无
探头摆动的实际精度:0.5°
②探头的旋转
旋转角度:-45°~+375°(一般使用范围:0°~+360°)
旋转速度:0.2 ~ 2 rpm
自锁:要
停电时可移动:不要
旋转限位:没有档块
零点设置:以探头在上面最高点时定为0°
旋转方向:以探头所在面为机架正面,探头顺时针方向旋转为正方向旋转(顺时针转动度数加大)。
脉冲编码器表示:1°(单位)
DA/PC控制:有
探头旋转的实际精度:0.5°
③探头的升降
升降运动范围:25 ~ 340 mm(以旋转中心为零点)
升降运动速度:300 mm / min
自锁:要
停电时可移动:不要
升降限位:有挡块
脉冲编码器表示:1mm(单位)
DA/PC控制:有
探头升降的实际精度:0.5mm
④ 遇阻报警、紧急制动
探头底平面设置面触摸开关(四个微动开关与接触面四角接触),只要某一接触点运动遇阻,立即会发出报警信号,并紧急制动。
⑵病床
①病床的升降
升降运动范围:600 ~ 950 mm(以地面为基准面)
升降运动速度:300 mm / min
自锁:要
停电时可移动:要
脉冲编码器表示:1mm(单位)
DA/PC控制:有
病床升降的实际精度:0.5mm
②病床的水平运动
运动范围 :0 ~ 2000 mm
最大扫描范围:不小于1900 mm
运动速度:30 ~ 1900 mm/min
扫描速度:100~500mm/min(在此范围内扫描速度要求均匀,非扫描速度范围内运动速度没有均匀性要求)
轮廓扫描:采用示教(学步)的方式,先定4~5个点,按垂直的折线运动。这部分的动作指令由计算机提供,由甲方负责编程。
自锁:要
停电时可移动:要
脉冲编码器表示:1mm(单位)
DA/PC控制:有
病床水平运动的实际精度:0.5mm
③病床的几个设计参数
床板采用碳素纤维复合材料,γ射线穿透衰减率不大于10%。重心在悬臂1500mm处时床板顶端挠度不大于25mm。
病床可承载的病人的最大重量:135 kg,其安全系数不小于4(详见附件一之附2《电气安全要求》)。
⑶液晶显示器
悬挂式液晶显示器一个,具有以下功能:开机后、采集数据前进入运动显示状态(有图和数据),采集后转为采集和运动同时显示状态(屏幕主要部分显示采集状态,下边部分简要显示运动状态)。其运动控制状态的界面至少有6个。
在运动显示状态下,用触摸键或手动控制盒均能操作并显示运动状态的改变。
⑷ 手动控制盒
运动控制用的一个手动控制盒安装在机架一边,具有独立控制探头和床运动的功能,并具有将液晶显示器的显示状态在采集和运动显示之间切换的功能。与液晶显示器触摸键的控制功能平行
①“回零”功能
手动控制盒和液晶显示器的触摸键均设有“回零键”。“回零”时,床、探头的上下和旋转角度均到零位。“回零”最好是同时进行(对床是先水平到零,后上下到零),如不能同时进行,分别顺序进行也可以。床板水平的零位:床板离机架的远端到头,然后再往回一定距离(如10mm)将位置
设为0mm。另一端与床边齐,上下与探头的外边对齐。
床高低的零位:床板下降到极点(离地面650mm处)然后待上升一定距离后(如10mm)
将位置设为0mm。
探头上下的零位:探头处于最外边,然后待下降一定距离后(如10mm)将位置设为
0mm。
探头旋转的零位:探头导轨处于最高处定为0°。
- 几个设计参数
a) 机架中孔的中心离地面的距离:950 mm
b) 机架中孔直径:700 mm
c)探头探测面朝下时,该面离地面的最大距离:≤1,290 mm
d)探头探测面朝上时,该面离地面的最大距离:≥ 610 mm
③ DA/PC与PLC通信,实现运动控制
PLC组件接受来自DA-PC的指令,解释并实现3.1 中包括的运动控制,PLC也根据DA-PC的指令将当前的运动状态发送给DA-PC。具体的指令如下:
指令为一个以回车键(ox0d)结束的字符串,格式如下:
命令 轴 [参数]
命令包括: move 沿指定轴向运动到指定的位置;
mover 沿指定轴向运动指定的偏移量;
position 返回指定轴的当前位置;
setv 设置指定轴的运动速度;
stat 返回指定轴的当前状态。
状态包括: stopped 停止状态
moving 正在运动
accelerating 正在加速
stopping 正在减速
如果使用不带轴参数的 stat命令,则返回如下信息:
change 运动状态显示/动态图象显示切换
error: xxx 错误以及错误代码
轴:包括以上提及的5个运动轴(z;r;t;y;b)
DA-PC与PLC之间以普通RS232C方式连接、通讯。
④手动控制盒与PLC通信,实现运动控制
PLC接受手动控制盒电平信号实现用户手动操作的运动控制。手动控制盒与PLC之间
通过普通信号电缆连接。
信号包括: 探头升降(2个);探头旋转(2个);床升降(2个);床水平运动(2个);
回零(1个);通讯复位(1个);显示切换(1个)。
电缆包括: 信号电缆:4根(8421编码);
直流电源电缆:2根(+5V,地)。
⑤电源
交流,频率50Hz±1 Hz ,电压380 V±38V,输入功率:不大于3kVA
⑸ 性能要求
① 外观要求
仪器的外观应端正、光洁,表面油漆涂层应符合YY/T91055―1999 《医疗器械油漆涂层分类、技术条件》的要求,金属制件的镀层要符合YY0076―92 金属制件的镀层分类
技术条件》(详见附件一之附1《外观要求》)。
② 机械特性
A、紧固件应安装牢固,各控制开关、调节旋钮(按键)应灵活可靠。
B、 整机机械和运动控制系统经加工、制造和调整后,能正确实现设计所规定的各项功能(见本文件3)。
C、 扫描稳定性
床板在扫描速度范围内,水平运动速度的稳定性:≤3%。
D、 旋转中心的偏离
旋转中心的偏离不得超过2mm,经过校正不大于1mm。
E、 噪音
整机运动产生的噪音:≤ 50dB
F、 电气安全性能
仪器的电气安全要求应符合GB9706.1―1995(IEC601-1-1988)《医用电气设备 第一部分:安全通用要求》。详见附件一之附2《电气安全要求》。
三、三号机的改进处与合理性
- 基座的改进设计
㈠ 外形尺寸与箱体结构
二号机基座的箱体外形尺寸为472mm×1458mm×1460mm,重新设计后为250mm×1428mm×1458mm。箱体结构二号机为六面箱体(图一a),现设计为八面箱体(图一b)。重新设计去掉箱体后部222mm×1428mm×1460mm体积。箱体内部计算机、UPS电源、倍增管电源、移至机体外部电控箱内,使箱体重量减轻前后尺寸缩短,整体显得轻巧。箱体上部设计成梯形结构,外
(图一a) (图一b)
罩圆面半径减小至800mm使机体外罩更轻巧。
㈡ 材料损耗与加工成本
基座重新设计后比二号机基座箱体重量减轻41.9kg。箱体焊接焊缝比二号机基座箱体减少5328mm。材料费减少125.7元(按普碳钢3000元/吨),加工费减少266.4元(按25元/米焊、割)
热处理费减少83.8元(按2元/公斤)。不计人工费和管理费及其它附加费用,共减少费用475.9元
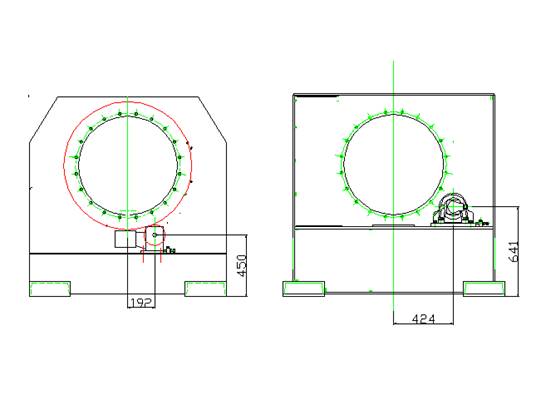
㈢ 结构的可靠性
重新设计的箱体在结构上仍为筋板焊接结构,支撑旋转框架和探头时的强度满足要求,不会发生断裂与变形。箱体在吊装时内部筋板起加强作用,不会时箱体变形开裂。
箱体的地脚支撑总长度仍为997mm,支点向前移222mm。在无地脚螺栓固定时不会因外力而翻倒。见(图二) (图二) (图三)

㈣ 减速机形式和安装位置
减速机选择直角轴地脚安装型,安装位置降低186mm向中心位移234mm见(图四)。改变减速器型式减少了箱体后部突出尺寸见(图二),改变减速器安装位置减小拖链安装半径使结构更紧凑见(图三)。
(图四)
- 转动框架与基座连接结构设计
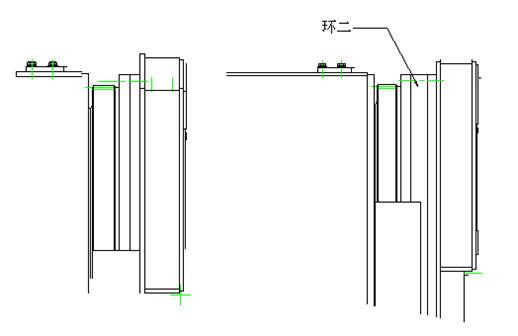
㈠ 连接部件的简化
二号机转动框架与基座连接由大轴承、环一、环二连接组成,现设计为大轴承、环一连接,去除了环二。在结构上前后尺寸缩短,安装维护更方便,减小了设备体积。见(图五)
㈡ 材料损耗与加工成本
去除环二减轻材料重量58kg,材料费减少174元(按普碳钢3000元/吨),加工费减少2000元(按25元/工时、80时)。
㈢ 重新设计后的特点
(图五)
去除环二,转动框架与基座连接间隙减小为147mm,减小了51mm。这样外罩尺寸也随之减薄外观显得轻巧。布线拖链选用22.075型使布线紧凑。拖链支撑长度减小50mm,销轴、支撑滚都减短50mm,节省了材料和加工费。
㈣ 结构的可靠性
去除环二,环一与大轴承连接装配不存在强度降低、影响刚度的问题。减小51mm使探头重心向基座移位51mm,翻转力矩半径减小安全性增大。减少中间连接件使装配和制造误差的累计量减小,增加了轴向连接精度(主要考虑装配误差)。
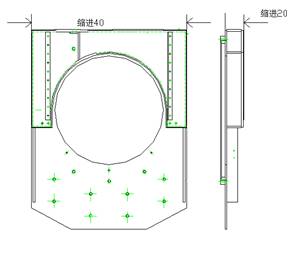
- 转动框架结构设计
㈠ 用材和尺寸改变
二号机转动框架用板均厚14 mm 外形尺寸1362mm×1060mm×160mm。重新设计后立筋钢板厚度减少2mm 宽度尺寸减少40mm 高度减少50mm 箱体厚度尺寸减少20mm 外形尺寸设计为1312mm×1320×140mm 材料选用Q235见(图六)
使加工焊接性更好。
(图六)
㈡ 转动框架材料损耗与加工成本
钢板减厚后材料减少35kg,(按普碳钢3000元/吨)材料费减少105元。由材料重量产生的相关费用将降低。
㈢ 配重设计
配重设计成四块三组式,便于拆卸运输。而且可灵活调整配重量达到节省功率的目的见(图七)。㈣ 配重的加工成本
配重原为整体铸造加工,分体后增加铸造加工和机加工成本(25元/工时 10工时)250元。
 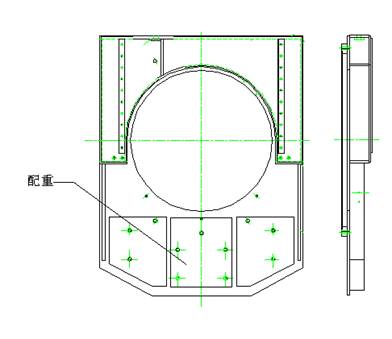
㈤ 结构的可靠性
(图七)
因框架结构没有改变,其结构稳定性不会变,钢板减薄后转动框架的刚度与强度不受影响。
- 滑动框架的设计
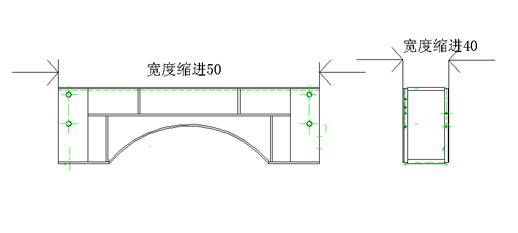
㈠ 结构和尺寸改变 (图八)
将封闭式箱体结构设计为单面开放式立筋结构,(见图八)宽度减少50mm 厚度尺寸减少40mm外形尺寸设计为 934mm×289mm×132mm 钢板减厚2mm
㈡ 材料损耗与加工成本
钢板减厚后材料减少23.9kg,材料费减少71.7元。焊缝减少2336mm 加工费减少58.4元(按25元/米焊、割)
㈢ 结构的合理性
滑动框架箱体改成部分开放式,加工工艺难度增加(焊接变形),但减少了箱体重量。在箱体内设置了横向和竖直立筋使箱体刚性与强度不会降低。同时减少由于震动产生的共鸣。
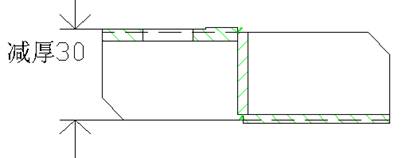
丝杠及丝杠支撑设计
(图九)
㈠ 结构和尺寸改变
丝杠支撑的厚度减少30 mm,结构不变。见(图九)
㈡加工成本减少
由于丝杠支撑的厚度减少30 mm ,丝杠相应减短30mm。转动框架上丝杠传动部件同步轮、减速机等相应降低30mm。减少10工时(30元/工时)300元。
 6悬臂和液晶屏设计 6悬臂和液晶屏设计
㈠ 结构和尺寸改变
悬臂改用40mm×40mm方管,多节组合,使悬臂更美观轻巧。悬臂支架的安装位置从基座顶端正中移至机座侧面,设备总高降低204mm,降至1764mm。见(图十)
㈡ 外观结构设计
见(图十一)
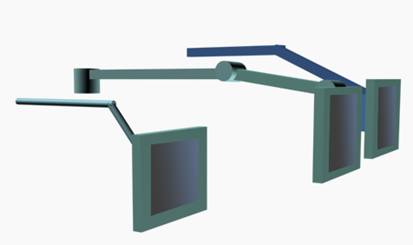
( 图十)
(图十一)
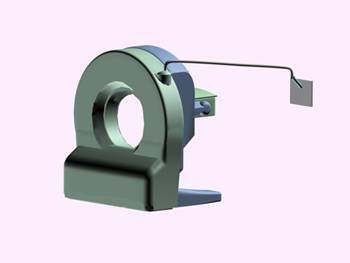
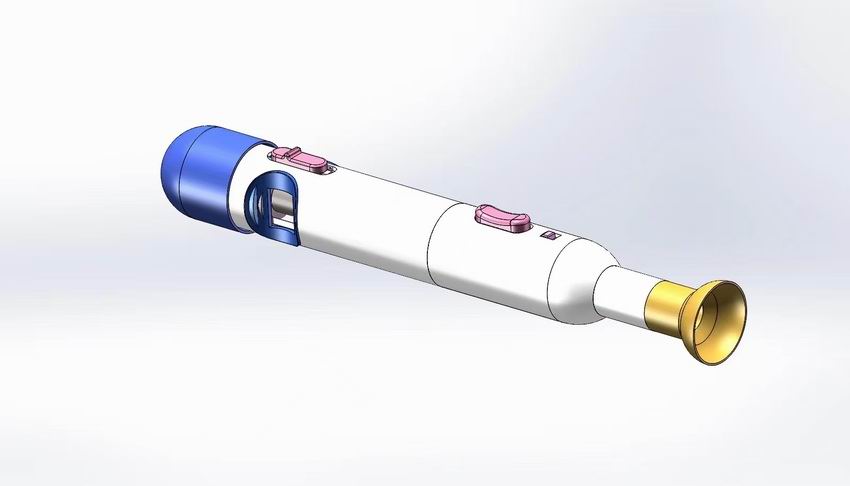
- 直器安装设计与探头结构
㈠ 结构改变
将准直器壳内屏蔽铅板移出另制成一板式结构与探头安装为一体,这一层使用铅板厚6mm,作为通用屏蔽层使用。这样减轻了所有准直器重量,移动准直器更灵活,使对正安装更方便。见(图十二)
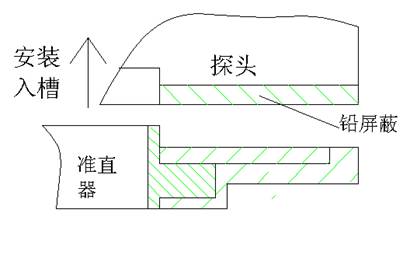
(图十二)
㈡ 准直器安装方式
准直器安装采用准直器车对位,垂直升降安装的方式。设备安放时在探头正下方预埋对位档块,准直器在准直器车上也采用定位安放方式。准直器车竟入定位区域定位后,人员操控探头下降安装。
㈢ 改进后的特点
改进后的准直器减轻了重量,利于搬运和安装。移去铅板前(以高能准直器计算)准直器重量为109.79kg。移去铅板后减重62kg。三准直器高能、低能、针孔使用同一屏蔽层,省去铅板107kg
8、电机和电机功率的选取
经计算转动框架承受的最大扭矩1986Nm,传动比7.7 选取0.5kw伺服电机减速机。
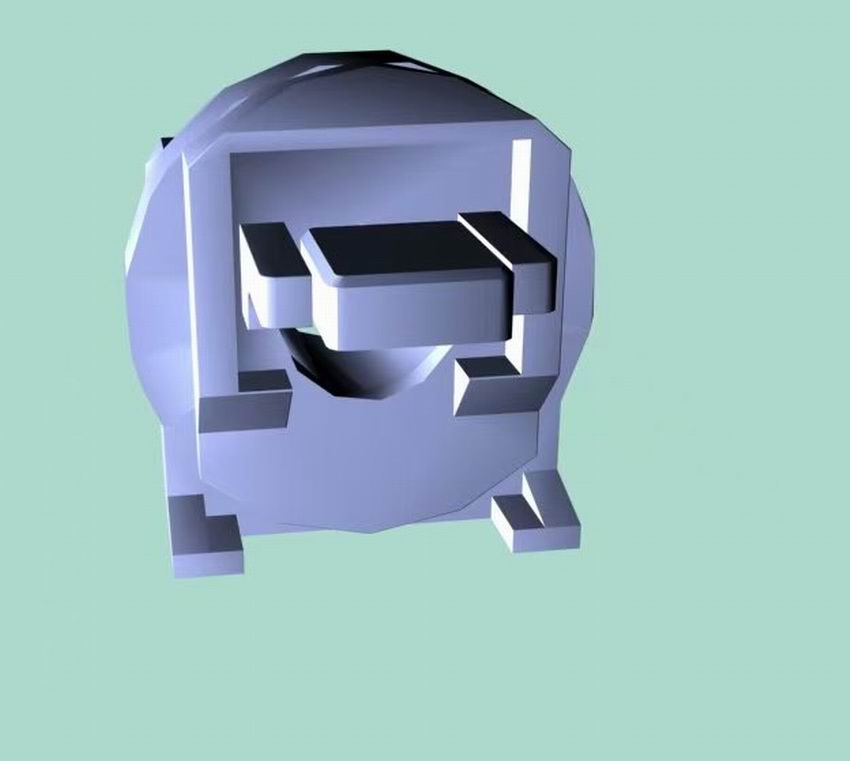
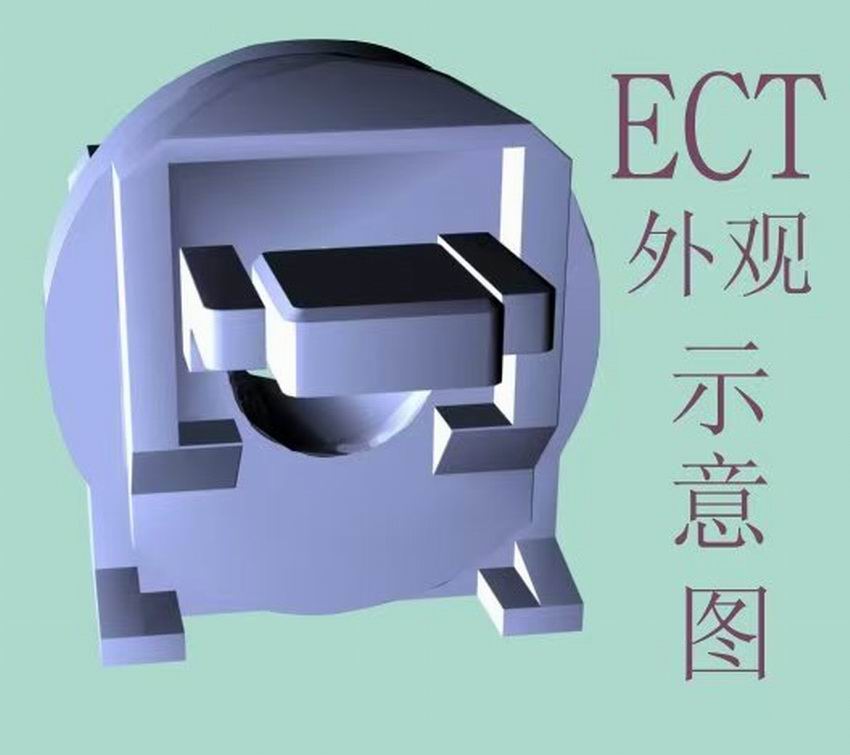
9、壳体和外观设计
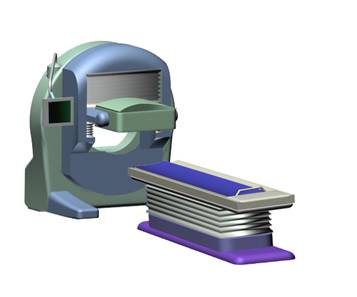
在机体结构参数确定后壳体和外观设计见(图十三、十四)
(见图十三)

(见图十四)
10、三号机重量
二号ECT机体满重1954kg 三号机机体设计重量1688kg.。减重265.8kg
四、床的改进设计
⑴ 床板设计
- 床板横截面
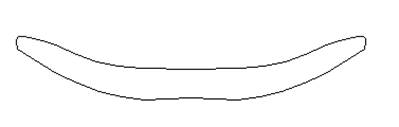 
床面截面为月牙形,见(图十五)厚度40mm。采用外层裹碳纤维材料,内部填充耐高温泡沫塑料的
(图十五)
复合结构。截面扫描区宽度设计为420mm,头枕宽度设计为200mm。
的物体
- 床板悬长与夹持端
要求扫描范围1900mm ,床板悬长应为1900mm+95mm,床板总长应为1900mm+95mm+夹持端长。夹持端尽可能设计的短些以求缩短床的总长。床板与头枕设计为分体结构,头枕可按需要安装。
⑵ 床板托架
床板托架仍采用现用床的结构,即薄板折弯焊接箱体加板金立筋结构。该结构轻巧、结构强度好、外表美观。床板周边增加护板防止床板伸出时刮碰病员。
⑶ 手动推拉功能
- 达到的功能要求
为满足床板快速回程到位、快速前伸到位的要求。床板平移设计自动平移和手动平移两种功能。
- 自动手动转换机构
床板平移的自动和手动转换可通过机械或电控手段实现。
㈠机械转换
机械转换设计是在床板下增加双托架机构,使用机械开关锁紧和松开床板,床板在托架上滑动实现手动功能。机械转换设计结构复杂、工艺难度增加、板材用量增加。
㈡电控转换
电控转换设计是在原结构不变的情况下,在伺服电机减速器传动轴端安装电磁离合器达到自动和手动转换的目的。使用电磁离合器工艺简单、不增加板材、安装简单。
⑷ 升降机构
床的升降机构要稳定能自锁、易维修、制造成本低。设计考虑使用直线导轨导向竖直丝杠传动或交叉支撑梁支撑水平丝杠传动两种机构。
㈠ 直线导轨导向竖直丝杠传动
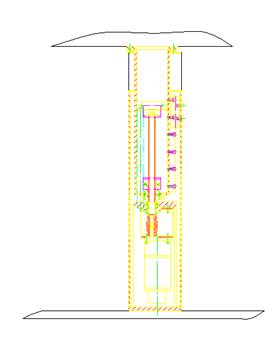 
直线导轨导向竖直丝杠传动机构设计采用立柱式结构(见图十五),结构特点是丝杠承重、导轨导向。主要零件采用外购成品件、装配简单、装配费用低。主要部件使用两套国产导轨费用1700元(参考价)、
(见图十五) (见图十六)
两套国产丝杠副费用1600元。采用这种结构边缘适合安装(见图十六),立柱结构高775mm,床的高度降低有难度、造型有局限性。特别立柱置于床托架中心线时,丝杠与床板升降时发生干涉。
㈡ 交叉支撑梁支撑水平丝杠传动
交叉支撑梁支撑水平丝杠传动采用剪刀叉式双支撑梁支撑(见图十七),水平丝杠传动。水平丝杠承受一部分轴向力。结构特点是占空间大、加工件多、铸铝件较脆,有冲击力时容易断裂。主要部件使用一对交叉支撑梁费用3880元(20000元/吨铝、木模2000元、加工费940元均为参考价)。一套丝杠副800元(参考价)。采用这种结构装配和加工费用高,造型单一。现用床均使用该结构,比较成熟。
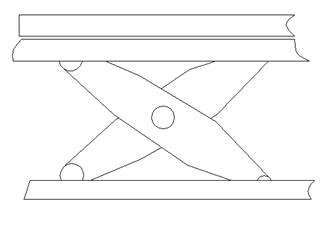
(见图十七)
㈢ 设计采用的结构
考虑结构与技术的成熟性,选择采用交叉支撑梁支撑水平丝杠传动的结构。设计上将缩小结构尺寸,加强构件强度。
⑸ 床的平移机构
床的平移机构设计仍现用床采用导轨导向并承重,同步带传动推进的方式。该结构比较成熟设计仍采用该设计。
⑹床的定位与移动方式
床的定位设计采用双定位销隐蔽安装,预埋三销孔预制件的定位方式。床的移动采用狐步舞移动方式(见图十八)。这样比单定轴转动移动灵活性大,让出空间大。
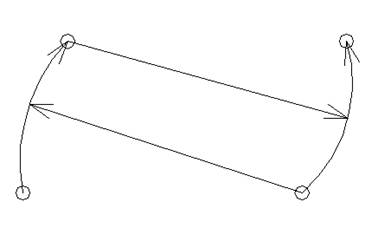
(见图十八)
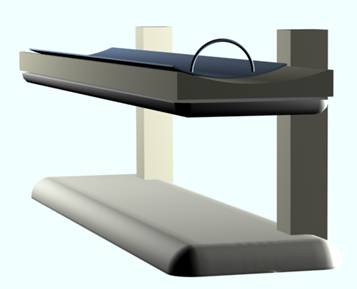
⑺ 整体外观设计
外观设计多种方案(见图十九、二十)
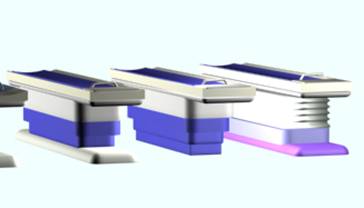
(图十九)交叉支撑梁支撑水平丝杠传动适用
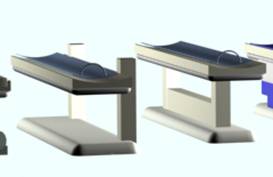
(图二十)直线导轨导向竖直丝杠传动适用
⑻ 床的整体构架设计
床的整体构架设计仍采用板金焊接结构,这样用材灵活适合轻型箱体制造。

⑼ 床的升降电机和平移电机功率重新计算
TLCP150砖包装箱机试制过程汇报
TLCP150砖包装箱机试制过程汇报纲要
序言
砖包机项目八月份正式启动,在xx公司的积极配合下经过了工艺了解、实物考察、资料收集等过程。在经过对原有试制样机的分析和补救设计后组装成形、配备电路、气路。经过一个月的紧张调试最终得到如今结果。情况汇报如下:
- 试验结果
1.1 装箱包数:5184包/小时(3x8,216箱。最新实验结果)
1.2 名义用气量:150L/m
1.3 名义用电量:9KW
1.4 适用箱型:只适合3x8 3x9
1.5 包装样式:无盖半包装
- 现有状态
2.1机械机构
2.1.1机械结构的局限性
㈠原有样机只是半成品,大部分没有组装成形。并且机构也未经过运行测试,在装配到位后发现很多问题。
㈡排包部分问题较少,但也存在机构与包运行干涉、机构与机构运行干涉、运动机构阻尼大等现象。这些都带试制过程中逐一解决了。
㈢装箱部分问题大,无参考。基本上只是一个框架。按原有设计和现有部件尺寸安装零件和部件,发现有工位与运行状态不协调的问题。再者也发现折纸工艺和下吸工艺与整体机构错位。这也通过再设计解决了
㈣按照修改后的机架安装布置气路,具有不合理处。
㈤由于机构和部件空间不能再调整,大梁最小间距不能满足3x7的要求
㈥正因为如此样机本身对于技术达标要求就有局限性。影像因素很多。只适合3x8 3x9状态。
2.1.2完善后的最佳状态
㈠排包部分更换了“排包阻尼回位挡板”滑轨和“排包阻尼回位挡板”轴的位置。使阻尼力正好,不会挤压砖包变形。
㈡排包部分排包进包机构重新修改了零件尺寸、安装位置,使之不干涉。
㈢装箱部分重新设定了箱工位间距、下吸摆臂轴心位置、纸板预拉工位。增加了纸板折边汽缸。
㈣装箱部分重新设定了推箱链条轴间距。(利乐10A,现在12A)
㈤丧失压盖工位
㈥在目前状态下,运行平稳功能实现良好。
2.1.3运行情况
㈠按目前试验调定时间计算出包数3240包/小时,时间延迟主要在排包区,依次8个循环为16秒,进包排队7秒,完成一个矩阵72包的矩阵80秒,在设备中为最慢时间。在调试中试验过减短时间到37秒,虽然可以偶然完成装箱功能,但由于没有导向导包机构,总有一些包会跳出传送网链或转90度,或反倒造成不稳定状态。
㈡最新实验结果5184包/小时。除去机械结构、运转特性的调整等因素。本台机从包排对到72包矩阵运行出第一传送带用时50秒。完成72包矩阵50秒的分配是排队24秒,矩阵加移出26秒。这样出包达5184包/小时。这是能达到的实际最大出包值,即216箱/小时
2.2电路电控
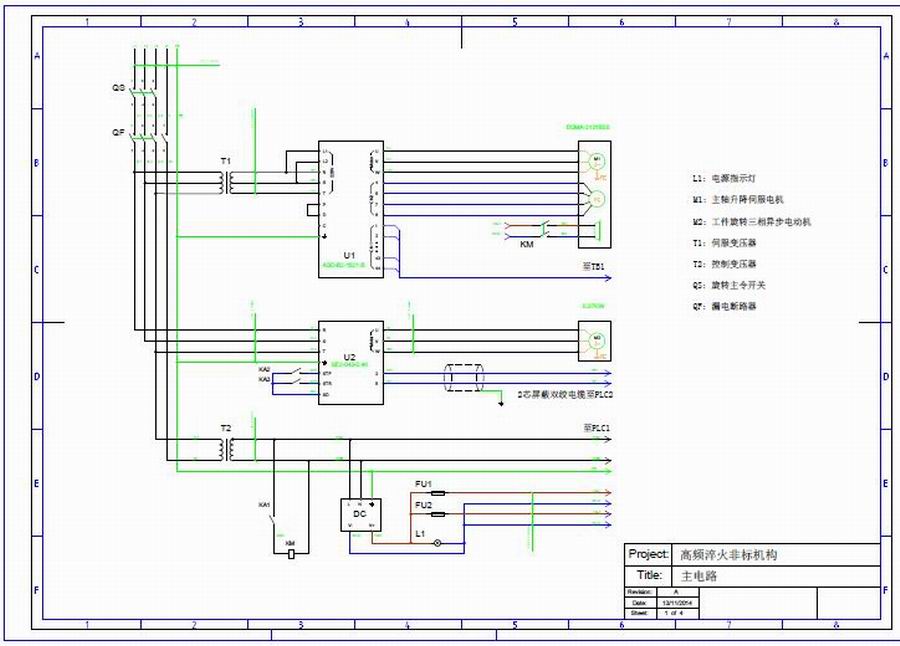
2.2.1在原有条件的基础上,搭建电路,基本上满足了装箱机的调试要求;要使本机商业化电路作适当调整,再增加保护电路单元即可,请参照装箱机电路图
2.2.2在程序编制过程中,本着“先实现功能,再提高工艺要求”的精神,随着对工艺的熟悉,不断的修改和调整使之达到了装箱机目前的技术要求;请参照装箱机框图。现有程序只适合试验机使用。
2.2.3在本月27日的调试,减少了程序当中时间常数,在现有条件的基础上排包循环时间以缩减至50秒,从现场观察进包机构的执行动作比较流畅,到位;个别的时间常数做了极端的测试,随即有掉包的情况发生
2.2.4
2.3理论推算最大出包数
该机进包传输速度已不能改变,除非更换减速机。如果程序继续优化,调整进包部分的气缸的阻尼系数,继续减少程序中的时间常数。进包循环周期还可以缩短10%~20%左右的时间。约6480包/小时
- 重点问题
3.1箱板的成形
箱板成形最大问题时,下拉折边时脱落和到位反弹。
3.2包裹成形
箱板四个折边顺序翻折到位,下翻边预翻,压紧。因为速度协调问题出现折不到位。
3.3行包稳定性
㈠机构运行速度过快不利于包运行稳定
㈡推包、排包机构尺寸、位置设置合理与否影响包运行稳定
㈢运行平面的通畅、过渡机构的设置很重要。
3.4动作协调
由于固有结构和元件不能改变,动作出现不协调
3.5喷胶头安装空间太小
3.6最大装箱数
一种设备不可能无限制地提高效率,机构运行是有一个极限值的。提高进包排队速度。
3.7控制与反馈方式
现在控制方式单一、传感器布局简单。PLC语言也是初级的。
3.8速度、尺寸、结构的协调
装箱部分由于速度、尺寸、结构的原因提高速度有困难。
- 解决思路
4.1改善真空气路
加大吸盘面积、缩短真空道距离、增加同流截面积。
4.2协调速度、尺寸、结构之间的关系
重新设计计算工位间距等
4.3调整机构与结构尺寸
4.4电控与机械统调
还要经过更多试验
4.5加大工位间距
针对大梁而言
4.6提高装箱数的方法
在该样机基础上重新设计需改进的传动机构、结构、机构尺寸和电控电路。
4.7重新设计电控方案
优化电控
- 实现达标的手段
5.1要实现15000包/小时的要求需改进方法一(22进包模式)
在提高传送带速度基础上
如果将进包机构改为双排进包,推包往复改为双排推进。时间可定为排一排9包需1.08秒,双排2.16秒(已加上后退时间),排包次数就为8次,即8.64秒。但推包只需要4次8.64秒,每次需2.16秒。动作每一种类都比4.1中的时间长,也就是执行机构运动速度低,那么设备运行稳定性就高。
5.2实现15000包/小时的要求改进方法二(332进包模式)
在提高传送带速度基础上
4.2中2x4模式进包速度仍然很快,为降低事故率,继续采用减少推包往复时间,增加排队时间的方法解决这个问题。将进包机构改为三排进包,对于3x8一箱可设置为前两步3排3排进包,而第三步关闭一排进口进包,即2排进包。即所谓332模式。推包往复速度为1.4秒,三排8包4.2秒,单行那么进包排队时间为1.64秒。这个时间较为合适。
5.3 PLC语言的设置延续本机编程风格,使用工程技术人员较为熟练的基本语句,增加本机调试窗口降低工程技术人员的调试难度;增加故障判断程序,以及故障解决引导程序;增加人机交互界面的流畅性,使其更加贴近用户。
屋顶清扫机设计方案论证
屋顶清扫机设计方案论证稿
xxxxxxx科技有限公司
- 目录
目录………………………………………………………………………………………1页
设计需求…………………………………………………………………………………2页
设计方案介绍……………………………………………………………………………2页
设计方案论证……………………………………………………………………………3页
预设元件与材料列表……………………………………………………………………附件五
安装场地与环境要求……………………………………………………………………附件六
附件七
- 设计需求
2.1 使用环境介绍
屋顶总长约16米。3块玻璃的平铺后宽度是近3.8米,大梁宽度0.2米。两个大梁之间共有12块玻璃组成,玻璃的厚度0.03米。玻璃可以上下平移,玻璃安装结构是成阶梯状排列。纵向的三块玻璃是平行安装的,中间用特制橡胶条隔雨,橡胶条约高于玻璃平面约4毫米。屋脊有一个横向大梁,高于玻璃0.2米。檐口安装有泄水天沟。使用环境为开放式,在北京地区。
2.2 用户要求
2.2.1用户提出的要求一:清洗机需要两台套,屋顶两边各一台,工作原理是:屋顶一边分三个部分,机械从第一部分上去,再向下清洗,清洗到屋檐后,平移到第二部分,再上去,然后再向下清洗。第三部分一样,最后设备还停留在第一部分的位置,屋顶那边是一样的,向上采用齿轮和平齿作为传动工具,平移采用两条导轨,需数控的。
2.2.2用户提出的要求二:采用两台清洗机,屋顶两边各一,可以上下、左右运动。机械停留位置最终在檐口的一端。上下运动采用:机械上用滚动齿轮,屋顶大梁上用平面齿,檐口的左右运动采用两条导轨运动。
2.2.3用户提出的要求三:檐口安装喷水装置,清洗机上安装直径230毫米的滚刷,长度约3.8米,一端安装电动机,此电动机可以带动滚刷转动和设备上下运动,电缆线的收圈机也用此电动机带动,收圈机安装在设备上,滚刷在下方,前方有刮水器,在滚刷与刮水器之间有一个弧形罩壳,以防水溅到刮水器旁。因玻璃是三块平铺的中间有橡胶条,所以刮水器上要有个缺口。采用电脑控制,触摸屏操作界面。
使用方式方式:按启动键,刮水器翘起,两台设备向屋顶上移,碰到屋顶上的行程开关后立即停止,刮水器落下,按清洗键:喷水,刷滚转动,设备慢慢下移。水柱的长度随着设备下移而减弱,但水的着落点是喷到滚刷上,接近玻璃也可。等设备到达屋檐时碰到开关停止,在向左或向右平移,平移到第二部分时,设备工作方式和第一部分一样。四个部分清洗完毕后设备停留到启动前的位置。
清洗不到位之处:屋顶的顶端:滚刷和刮水器的距离清洗不到,只能用刮水器刮了,再就是两块玻璃的重叠两接触,因为是台阶式,所以约有4―5厘米处不能清洗的和平面一样。
2.3 使用环境示意图
2.3.1 使用场地立面图(见附件一)
2.3.2 使用场地平面图(见附件二)
2.3.3 使用场地建筑平面图(见附件三)
- 设计方案介绍
3.1 方案一
根据用户提出的工况要求、功能要求和使用数据,完全按照用户的思路设计方案。设备主体跨度十六米,行走机构长七米二,采用齿轮驱动作为主动轮,屋顶大梁上用平面齿,檐口的左右运动采用两条导轨运动。清洗机上安装直径二百三十毫米,长度约三米八的滚刷。全长要安装四个滚刷。
根据上述要求,设备主要结构长约十六米,分为两部分屋檐两侧各一部分对称安装。设备悬挂八套滚刷。同时需要安装至少八套以上的刮水器。屋顶拱顶两侧安装齿条,需牢固定位安装。清洗机设计为自走形式。电控形式与机械机构配套设计。
3.2 方案二
考虑到工艺状况与制造安装情况,本方案采用越檐式行走方式,即行走跨过屋脊在两斜坡之间上下行走。考虑材料的限制设备采用分体安装设计,每个主体部分跨度八米,两台部件对称并排安装(甲方提供的要求为两台套)。行走机构设计为悬空式轨道,清洗机为拖曳式行走,桁架支撑。横向运动由桁车带动,可任意位置停留。滚刷设计为一米五以内长度,整体设备只需二台清洗机构、两个或四个滚刷及水刮器。电控形式与机械机构配套设计。
3.3 方案三
在尊重用户要求的基础上,该方案设计为四分体结构每个主体部分跨度八米,四台部件对称并排安装。行走机构设计为悬空式轨道,清洗机为拖曳式行走,桁架支撑。横向运动由桁车带动,可做矩阵式停留。该设计采用不跨越屋脊方式,四台清洗机只在四块五十六平方米范围内工作。电控形式与机械机构配套设计。
- 设计方案论证
4.1 方案的可行性
4.1.1 三个方案的结构复杂性对比
4.1.1.1在三个设计方案中,方案三明显结构复杂重复结构多,干涉点也越多。清扫死点也会增加,控制系统的复杂性也会增加。由于结构部件多设备重量也会增加,这不利于在屋顶安装以及设备使用的安全可靠。设备越复杂,安装越困难,维护也困难。
4.1.1.2 方案二的结构主体看似增加,但实际上尊重了工艺条件状况。该方案使用二台清洗机,在两个分部件中只安装各一台,这与方案一对比数目是相同的,但其有本质的不同。相对小的滚刷,质量小,可能发生的震动与功率都要小。行走稳定性也要好。对接部分的干涉连着对比,方案二要小得多。因为纵向行走的端点跨越尺寸不可能重叠。而横向行走的跨越尺寸可以重叠。在本方案中传动链可以共用,而方案一是不可共用的。方案一的主题悬梁工艺要求高,尺寸大,重量也大。
4.1.1.3 方案一的结构在使用材料上不符合现有现用原则,也不符合常规机械设计的要求,因为其跨度大,超出常规材料尺寸,需要定制或特殊制造。其行走方式也是有诸多问题。屋顶安装使用齿轮齿条,齿条的安装定位没有基准,也很难找到或要求用户建造出合乎机械安装要求的基体。滚刷的转动会引起设备的共振,在陆地上这不是问题,但是在悬空的屋顶上就是很重要的问题。
该方案的自走形式是不可取的,设备运行首先是安全。该自走形式不能排除脱齿,安装基体变形带来的不入位,或由于恶劣天气导致的局部故障。更重要的是该方案将使设备重量很大。
4.1.2三个方案的制造可行性对比
4.1.2.1制造的原则是现有现用、实现容易、工艺简单。在三个方案中方案一工艺难度大,制造安装、维护难度也很大。部件和构件制造要求高。此外其对安装基体的要求用户很难达到。该方案设计安装的附着点不在建筑的承重墙上,存在安全隐患。该方案制造难度大。
4.1.2.2方案二结构小,跨度小,工艺实现容易。设备部件数量与方案一相当,安装点在承重墙上,轨道悬空。在屋顶有变形或受压时不受影响。该方案制造容易,吊装方便。
4.1.2.3 方案三重复性大,桁架重叠耗费材料。清洗部件多,整体重量达。制造费用相对高。工艺难度与方案二相当,但重复多。安装点多给安装带来困难,维护也相对有难度。各项成本都增加。
4.1.3三个方案的制造成本性对比
4.1.3.1三个方案每个的制造成本均因不同因素而不同,方案一由于其重量大、跨度大、安装难度大等因素是三个方案中制造成本最高的或与方案三相同。
4.1.3.2方案二结构简单、机构和部件数少、工艺可实现。因而成本低。
4.1.3.3方案三尽管工艺与方案二近似,但数量大、重量大。成本比方案二高。
4.1.4三个方案的维护成本性对比
4.1.4.1 方案二的维护成本因为4.1.3.2之原因是三个方案中最低的。
4.1.4.2 方案一与方案三因为4.1.3.1、4.1.3.3之原因维护成本高。
4.2 推荐采用的方案
4.2.1 推荐的设计方案
在此我们推荐方案二,其优点是结构简单、成本相对低、制造方便、安装难度相对小。因为结构简单,清洗部件小,给相关机械系统留有的空间大。控制也方便。机构数量少故障率也会少。因而我们推荐该方案。
4.2.2 设计思路
4.2.2.1 电气设计原则
本系统采用电机驱动毛刷机构旋转与水力结合清理屋顶玻璃,电机驱动行架使清洗机构在预清洗区域缓慢移动,达到清洗整体区域的目的。
4.2.2.1.1由于本系统位于屋顶,因此在日常工作中屋顶清洗机必须是在自动状态下进行工作,减少人为操作,本控制系统将设计成全自动控制系统。
4.2.2.1.2该程序可有甲方工作人员自行设定工作时间,启动停止均不用操作人员手动操作,只有在调试和维修状态工作人员可将设备调整为手动状态。本控制系统才可以手动控制。
4.2.2.1.3本系统采用PLC控制,并有触摸屏动画显示工作流程,并可以人机对话,操作人员只要经过短暂培训即可轻松操作本系统。
4.2.2.1.4安全使用,本机将对安全部位实施自动检测并与驱动装置连锁,一旦检测发现位置异常,第一停止驱动,第二马上在显示屏上做成声光警示,确保本机安全之用。
4.2.2.1.5轻松解决问题,本系统将在触摸屏上设置帮助画面,以使用者在有问题时轻松应对。
4.2.2.1.6电气控制系统用电为三相五线制:计算用电量约:10KW,预留电缆:YJV3*6mm2+2*4mm2
4.2.2.1.7 工作程序框图
( 附件四)
4.2.2.1.8本控制系统基本材料清单
序号 |
名称 |
型号 |
数量 |
单位 |
执行标准 |
备注 |
1 |
触摸屏 |
T8000 |
1 |
台 |
维纶 |
以设计为准 |
2 |
PLC |
S7 200系列 |
1 |
台 |
西门子 |
|
3 |
传感器 |
|
1 |
批 |
OMRON |
|
4 |
行程开关 |
|
1 |
批 |
OMRON |
|
5 |
低压元件 |
|
1 |
批 |
国标 |
|
6 |
电线电缆 |
|
1 |
批 |
国标 |
|
7 |
控制箱体 |
700*500*200 |
1 |
台 |
国标 |
|

图表 1 屋顶清洗机控制示意图
4.2.2.1.9 机械设计原则见4.2.3 中条款和4.2.1 中文字。
4.2.3 设计注重的要点
4.2.3.1 结构简单容易制造。
4.2.3.2 制造工艺简单容易实现,现有现用。
4.2.3.3 结构容易安装、装运、组合方便。
4.2.3.4 机构运行安全可靠。
4.2.3.5 运行噪音低(60分贝以下)
4.2.3.6 控制简便、学习易懂。
4.2.3.7 设备维护方便。
4.2.3.8 电缆连接和拖动采用纵横两套拖链,以避免线缆损坏。
4.2.3.9 局部机构采用除冰和除霜设施防冻。
- 预设元件与材料列表
(见附件五)
- 安装场地与环境要求
6.1 安装示意图(附件六、附件七)
6.2 清洗水管预埋要求:清洗水管在设备安装前要预埋输水管线,在设备周边预埋四至八个出水口,以便取水。
6.3 供水系统要求在安装场地有独立的设备空间,设备房或安放室。
7、预估费用与时限(此条款仅供参考,不可作为制造依据)
7.1 预估制造费用:按设备设计方案二预估制造费用为二十五万,其中不含现场安装调试费。
7.2 时限
7.2.1 设计时间:预计180天
7.2.2 制造时间:180天
7.2.3 厂内调试时间:30天
xxxxxxxxx科技有限公司
|







































{kind=link}
{kind=link}